Practice-1: elastic body collision#
By Yongjin Choi, Georgia Institute of Technology Website
![]()
import numpy as np
import matplotlib.pyplot as plt
import itertools
from matplotlib.collections import PolyCollection
from matplotlib.collections import LineCollection
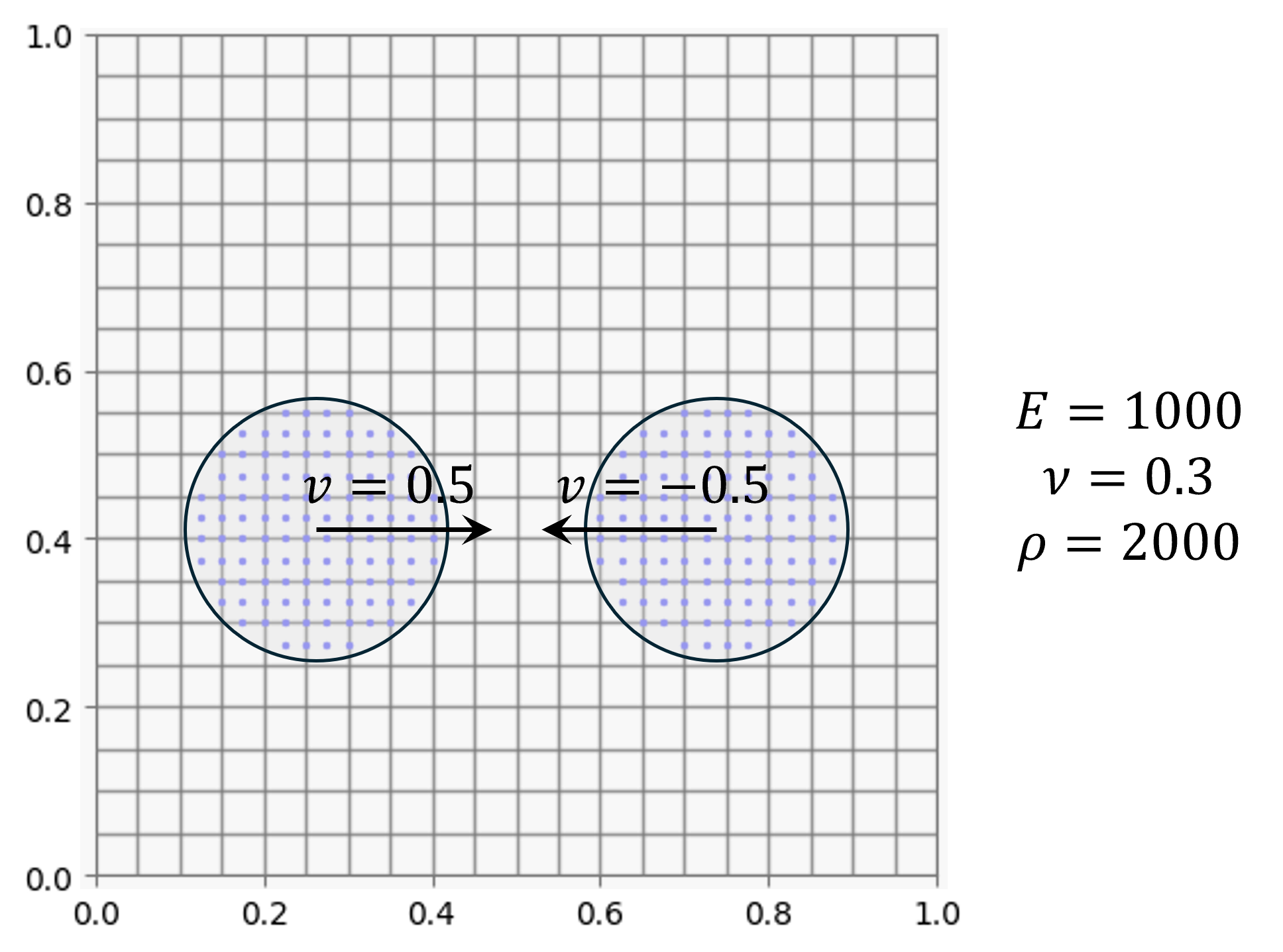
Problem#
This example considers two elastic circular body colliding with specified initial velocity. Two body has the same material property.
Helper functions#
def elasticity_matrix(youngs_modulus: float, poissons_ratio: float, stress_state: str) -> np.ndarray:
"""Compute the elasticity (stiffness) matrix for an isotropic elastic material.
Args:
youngs_modulus: Young's modulus of the material.
poissons_ratio: Poisson's ratio of the material.
stress_state: Type of stress state. Must be one of "PLANE_STRESS",
"PLANE_STRAIN", or "3D".
Returns:
Elasticity matrix as a numpy array.
Raises:
ValueError: If an invalid stress_state is provided.
"""
if stress_state == 'PLANE_STRESS':
C = youngs_modulus / (1 - poissons_ratio**2) * np.array([
[1, poissons_ratio, 0],
[poissons_ratio, 1, 0],
[0, 0, (1 - poissons_ratio) / 2]
])
elif stress_state == 'PLANE_STRAIN':
C = youngs_modulus / ((1 + poissons_ratio) * (1 - 2 * poissons_ratio)) * np.array([
[1 - poissons_ratio, poissons_ratio, 0],
[poissons_ratio, 1 - poissons_ratio, 0],
[0, 0, 0.5 - poissons_ratio]
])
else: # 3D stress state
C = np.zeros((6, 6))
C[:3, :3] = youngs_modulus / ((1 + poissons_ratio) * (1 - 2 * poissons_ratio)) * np.array([
[1 - poissons_ratio, poissons_ratio, poissons_ratio],
[poissons_ratio, 1 - poissons_ratio, poissons_ratio],
[poissons_ratio, poissons_ratio, 1 - poissons_ratio]
])
C[3:, 3:] = youngs_modulus / (2 * (1 + poissons_ratio)) * np.eye(3)
return C
def generate_circle_particles(center: list, radius: float, spacing: float) -> np.ndarray:
"""Generate a set of particle coordinates within a circle.
Args:
center: [x, y] coordinates of the circle center.
radius: Radius of the circle.
spacing: Grid spacing between particles.
Returns:
Array of particle positions, each row as [x, y].
"""
center_array = np.array(center)
# Determine grid origin so that the grid is consistent regardless of the circle center.
grid_origin = (center_array // spacing) * spacing
# Define grid limits based on the circle radius.
xmin, ymin = grid_origin - radius
xmax, ymax = grid_origin + radius
# Generate grid points.
x_coords = np.arange(xmin, xmax + spacing, spacing)
y_coords = np.arange(ymin, ymax + spacing, spacing)
Xp, Yp = np.meshgrid(x_coords, y_coords)
Xp = Xp.flatten()
Yp = Yp.flatten()
# Keep only points that lie inside the circle.
inside = (Xp - center_array[0])**2 + (Yp - center_array[1])**2 <= radius**2
return np.vstack([Xp[inside], Yp[inside]]).T
def particle_element_mapping(particle_positions: np.ndarray, cell_width: float, cell_height: float,
n_ele_x: int, n_elements: int):
"""Map each particle to an element based on its position.
Args:
particle_positions: Particle positions as an array of shape (n_particles, 2).
cell_width: Element (cell) width in the x-direction.
cell_height: Element (cell) height in the y-direction.
n_ele_x: Number of elements in the x-direction.
n_elements: Total number of elements.
Returns:
ele_ids: Array of element ids for each particle.
particle_ids_in_elements: List of particle indices for each element.
"""
x_indices = np.floor(particle_positions[:, 0] / cell_width).astype(int)
y_indices = np.floor(particle_positions[:, 1] / cell_height).astype(int)
ele_ids = x_indices + n_ele_x * y_indices
particle_ids_in_elements = [[] for _ in range(n_elements)]
for p, e in enumerate(ele_ids):
particle_ids_in_elements[e].append(p)
return ele_ids, particle_ids_in_elements
def lagrange_basis(element_type: str, local_coord: np.ndarray):
"""Compute the shape functions and their derivatives for a finite element.
Args:
element_type: Type of element. Currently only "Q4" is supported.
local_coord: Array of local coordinates [xi, eta].
Returns:
N: Shape function values.
dN_dxi: Derivatives of the shape functions with respect to xi and eta.
Raises:
ValueError: If an unsupported element type is provided.
"""
if element_type == 'Q4':
xi, eta = local_coord
N = np.array([
(1 - xi) * (1 - eta),
(1 + xi) * (1 - eta),
(1 + xi) * (1 + eta),
(1 - xi) * (1 + eta)
]) / 4.0
dN_dxi = np.array([
[-(1 - eta), -(1 - xi)],
[ (1 - eta), -(1 + xi)],
[ (1 + eta), (1 + xi)],
[-(1 + eta), (1 - xi)]
]) / 4.0
else:
raise ValueError(f"Unsupported element type: {element_type}")
return N, dN_dxi
def compute_local_coord(particle_pos: np.ndarray, element_coords: np.ndarray,
cell_width: float, cell_height: float) -> np.ndarray:
"""Compute the local (ξ, η) coordinates for a particle within an element.
Args:
particle_pos: [x, y] coordinates of the particle.
element_coords: Coordinates of the element nodes (4 x 2 array).
cell_width: Element width in the x-direction.
cell_height: Element height in the y-direction.
Returns:
Local coordinates [ξ, η].
"""
xi = (2 * particle_pos[0] - (element_coords[0, 0] + element_coords[1, 0])) / cell_width
eta = (2 * particle_pos[1] - (element_coords[1, 1] + element_coords[2, 1])) / cell_height
return np.array([xi, eta])
Material properties#
E = 10000
nu = 0.3
rho = 2000
C = elasticity_matrix(E, nu, "PLANE_STRAIN")
D = np.linalg.inv(C)
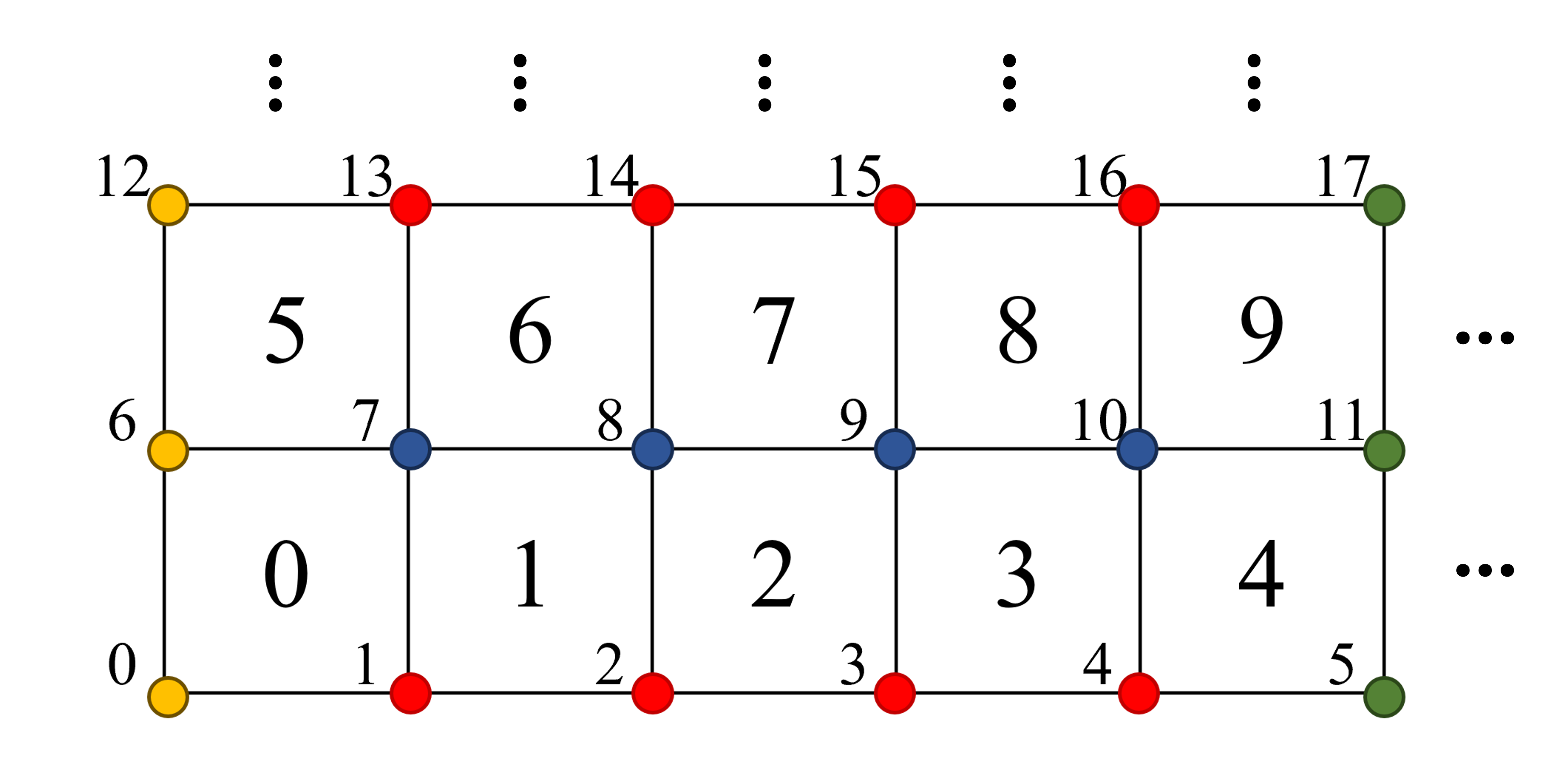
Mesh#
This step create background mesh. This example uses the following element (cell) and node numbering.
# length of domain
l = 1
# number of elements for each dim
n_ele_x = 20
n_ele_y = 20
# cell size
delta_x = l / n_ele_x
delta_y = l / n_ele_y
# number of grid nodes
n_node_x = n_ele_x + 1
n_node_y = n_ele_y + 1
n_nodes = n_node_x * n_node_y
# Generate mesh nodes
x_coords = np.linspace(0, l, n_node_x)
y_coords = np.linspace(0, l, n_node_y)
X, Y = np.meshgrid(x_coords, y_coords)
nodes = np.vstack([X.flatten(), Y.flatten()]).T
# Generate elements (connectivity)
elements = []
for j in range(n_node_y - 1):
for i in range(n_node_x - 1):
n1 = j * n_node_x + i
n2 = n1 + 1
n3 = n2 + n_node_x
n4 = n1 + n_node_x
elements.append([n1, n2, n3, n4])
elements = np.array(elements)
elements_coordinate_map = nodes[elements]
n_elements = elements.shape[0]
# Boundary nodes
bottom_nodes = np.where(nodes[:, 1] < 1e-8)[0]
upper_nodes = np.where(nodes[:, 1] > l - 1e-8)[0]
left_nodes = np.where(nodes[:, 0] < 1e-8)[0]
right_nodes = np.where(nodes[:, 0] > l - 1e-8)[0]
# Init node quantities
nodal_masses = np.zeros(n_nodes) # nodal masses
nodal_momentums = np.zeros((n_nodes, 2)) # nodal momentums
nodal_iforces = np.zeros((n_nodes, 2)) # Internal forces
nodal_eforces = np.zeros((n_nodes, 2)) # External forces. Not used in this practice
# Init grid state variables
nodal_stresses = np.zeros((3, n_nodes)) # [sig_xx, sig_yy, sig_xy]
nodal_disp = np.zeros((2, n_nodes)) # [disp_x, disp_y]
Particles#
Two circular body is discretized with material points. The material points carry the information about velocity, position, stress, strain, mass, volume.
# Inputs for particles
n_particle_per_cell_per_dim = 2
vel_p1 = [0.15, 0.0]
vel_p2 = [-0.15, 0.0]
# Generate particles for two circles
spacing = delta_x / n_particle_per_cell_per_dim
particles1 = generate_circle_particles(
center=[0.2625, 0.4125], radius=0.15, spacing=spacing)
particles2 = generate_circle_particles(
center=[0.7375, 0.4125], radius=0.15, spacing=spacing)
pset_velocity1 = np.tile(vel_p1, (len(particles1), 1))
pset_velocity2 = np.tile(vel_p2, (len(particles2), 1))
# particle states
xp = np.vstack([particles1, particles2])
vp = np.vstack([pset_velocity1, pset_velocity2])
s = np.zeros((len(xp), 3)) # [sigma_xx, sigma_yy, sigma_xy]
eps = np.zeros((len(xp), 3)) # [epsilon_xx, epsilon_yy, gamma_xy]
Fp = np.tile([1.0, 0.0, 0.0, 1.0], (len(xp), 1)) # Deformation gradient
# Find elements to which particles belong
ele_ids_of_particles, p_ids_in_eles = particle_element_mapping(
xp, delta_x, delta_y, n_ele_x, n_elements)
active_elements = np.unique(ele_ids_of_particles)
active_nodes = np.unique(elements[active_elements, :])
# Compute initial particle volume
Vp = np.zeros(len(xp))
# Volume (area) of each background cell
for p_ids_in_ele in p_ids_in_eles:
n_mp_in_element = len(p_ids_in_ele)
if n_mp_in_element > 0:
volume_per_mp = (delta_x * delta_y) / n_mp_in_element
Vp[p_ids_in_ele] = volume_per_mp
Vp0 = Vp.copy() # save initial volume
Mp = Vp * rho # mass of particles
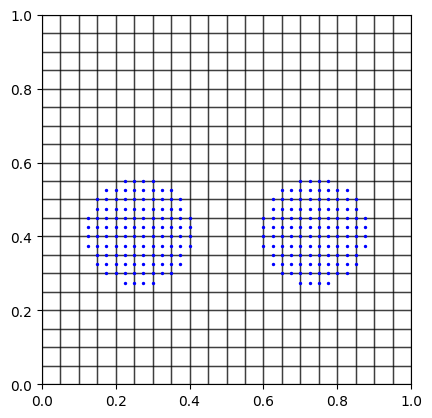
See the mesh and particle configuration
# Plot mesh, particles
def plot_2d_meshes(meshes, particles):
"""
Plots multiple 2D meshes using node coordinates and face indices.
Parameters:
- meshes: A list of tuples, where each tuple contains:
- node_coords: A NumPy array of shape (n_nodes, 2) containing the (x, y) coordinates of the mesh nodes.
- faces: A list or array of faces, where each face is represented by a list of node indices (referring to the node_coords).
- particles: A numpy array for particle coordinates (n_particles, 2) containing the (x, y) positions of the particles.
Example:
- meshes = [
(np.array([[0, 0], [1, 0], [1, 1], [0, 1]]), [[0, 1, 2, 3]]),
(np.array([[2, 2], [3, 2], [3, 3], [2, 3]]), [[0, 1, 2, 3]])
]
"""
# Define a color cycle for different meshes
colors = itertools.cycle(plt.cm.tab10.colors) # Using tab10 colormap for up to 10 distinct colors
# Set up the plot
fig, ax = plt.subplots()
# Iterate over the meshes and plot each one
for node_coords, faces in meshes:
# Create a list of polygons using the face indices and node coordinates
polygons = [node_coords[face] for face in faces]
# Create a PolyCollection from the polygons
poly_collection = PolyCollection(
polygons, edgecolors='black', facecolors='none', alpha=0.5)
# Add the PolyCollection to the plot
ax.add_collection(poly_collection)
ax.scatter(particles[:, 0], particles[:, 1], color='blue', s=2.0)
# Set the limits of the plot to the bounding box of all node coordinates
all_coords = np.vstack([node_coords for node_coords, _ in meshes])
ax.set_xlim(np.min(all_coords[:, 0]), np.max(all_coords[:, 0]))
ax.set_ylim(np.min(all_coords[:, 1]), np.max(all_coords[:, 1]))
ax.set_aspect('equal')
# Display the plot
plt.show()
meshes = [(nodes, elements)]
plot_2d_meshes(meshes, xp)
Analysis setting#
dtime = 0.001
time = 3
t = 0
output_save_interval = 100
g = 0.5 # Gravity is reduced for taking a larger timestep.
Computation cycle#
We are using explicit USL (update stress last) algoritm. The computation procedure is as follows. The details can be found in the original source (Nguyen et al., 2023).
The entire computation cycle is as follows.
Initialization
Set up the Cartesian grid, set time \(t = 0\).
Set up particle data: \(x^0_p, v^0_p, \sigma^0_p, F^0_p, V^0_p, m_p, \rho_p^0, \rho_p^0\).
while \(t < t_f\) do
Reset grid quantities: \(m^t_I = 0\), \((mv)^t_I = 0\), \(f^{ext,t}_I = 0\), \(f^{int,t}_I = 0\), \(f^t_I = 0\).
Mapping from particles to nodes (P2G)
Compute nodal mass
\[ m^t_I = \sum_p \phi_I(x^t_p)m_p \]Compute nodal momentum
\[ (mv)^t_I = \sum_p \phi_I(x^t_p)(mv)^t_p \]Compute external force
\[ f^{ext,t}_I = \sum_p \phi_I(x^t_p)m_pb(x_p) \]Compute internal force
\[ f^{int,t}_I = - \sum_p V^0_p \sigma^t_p \nabla \phi_I(x^t_p) \]Compute nodal force
\[ f^t_I = f^{ext,t}_I + f^{int,t}_I \]Update the momenta
\[ (mv)^{t+\Delta t}_I = (mv)^t_I + f^t_I \Delta t \]Fix Dirichlet nodes \(I\), e.g., \((mv)^t_I = 0\) and \((mv)^{t+\Delta t}_I = 0\).
Update particles (G2P)
Get nodal velocities
\[ v^t_I = (mv)^t_I / m^t_I \ \text{and} \ v^{t+\Delta t}_I = (mv)^{t+\Delta t}_I / m^t_I \]Update particle velocities
\[ v^{t+\Delta t}_p = \alpha \left(v^t_p + \sum_I \phi_I(x^t_p)\left[v^{t+\Delta t}_I - v^t_I \right] \right) + (1 - \alpha) \sum_I \phi_I(x^t_p)v^{t+\Delta t}_I \]Update particle positions
\[ x^{t+\Delta t}_p = x^t_p + \Delta t \sum_I \phi_I(x^t_p)v^{t+\Delta t}_I \]Compute velocity gradient
\[ L^{t+\Delta t}_p = \sum_I \nabla \phi_I(x^t_p)v^{t+\Delta t}_I \]Updated gradient deformation tensor
\[ F^{t+\Delta t}_p = (I + L^{t+\Delta t}_p \Delta t) F^t_p \]Update volume
\[ V^{t+\Delta t}_p = \text{det}(F^{t+\Delta t}_p) V^0_p \]Compute the rate of deformation matrix
\[ D^{t+\Delta t}_p = 0.5(L^{t+\Delta t}_p + (L^{t+\Delta t}_p)^T) \]Compute the strain increment
\[ \Delta \varepsilon_p = \Delta t D^{t+\Delta t}_p \]Update stresses:
\[ \sigma^{t+\Delta t}_p = \sigma^t_p + \Delta \sigma \Delta \varepsilon_p \quad \text{or} \quad \sigma^{t+\Delta t}_p = \sigma^t(F^{t+\Delta t}_p) \]
Advance time \(t = t + \Delta t\).
Error calculation: if needed (e.g., for convergence tests).
end while
Initialization#
times = []
kinetic_energy_evolution = []
strain_evergy_evolution = []
nsteps = int(time / dtime)
step = 0
pos = []
vel = []
Start computation cycle (while loop)#
Reset grid quntities#
\(m^t_I = 0\), \((mv)^t_I = 0\), \(f^{ext,t}_I = 0\), \(f^{int,t}_I = 0\), \(f^t_I = 0\).
print("Computation cycle started...")
while t < time:
if step % output_save_interval == 0:
print(f"Time: {t:.5f}/{time}")
# Refresh the nodal values
nodal_masses.fill(0)
nodal_momentums.fill(0)
nodal_iforces.fill(0)
nodal_eforces.fill(0)
nodal_stresses.fill(0)
Mapping from particles to nodes (P2G)#
# Iterate over the computational cells (i.e., elements)
for ele_id in active_elements:
# node ids of the current element
node_ids = elements[ele_id]
# coords of the current element
node_coords = nodes[node_ids, :]
# particle ids inside the current element
material_points = p_ids_in_eles[ele_id]
# Iterate over the material points in the current cell
for p in material_points:
# Convert global coordinate "p=(x, y)" to local coordiate "pt=(xi, eta)".
pt = np.array(
[(2 * xp[p, 0] - (node_coords[0, 0] + node_coords[1, 0])) / delta_x,
(2 * xp[p, 1] - (node_coords[1, 1] + node_coords[2, 1])) / delta_y])
# Evaluate shape function and its derivatives with respect to local coords (xi, eta) at (x, y).
N, dNdxi = utils.lagrange_basis("Q4", pt)
# Evaluate the Jacobian at current the current local coords (xi, eta).
jacobian = node_coords.T @ dNdxi
# Get the inverse of Jacobian
inv_j = np.linalg.inv(jacobian)
# Get the derivative of shape function with respect to global coords, i.e., (x, y)
dNdx = dNdxi @ inv_j
Iteration Over Active Elements
The first step iterates over active elements, identified as elements containing particles. For each element:
node_ids: Retrieves the indices of the nodes associated with the element.node_coords: Retrieves the spatial coordinates of these nodes:
where \( (x_i, y_i) \) are the global coordinates of the \( i \)-th node of the element.
material_points: Identifies the particles currently within the element.
Convert Particle Global Coordinates to Local Coordinates
For each particle \( p \) in the element, its global coordinates \((x_p, y_p)\) are converted into the element’s local coordinate system \((\xi, \eta)\).
Formula for Local Coordinates:
where:
\( (x_p, y_p) \): Global coordinates of the particle.
\( (x_1, y_1), (x_2, y_2), (x_3, y_3), (x_4, y_4) \): Coordinates of the element’s corner nodes.
\( \Delta x, \Delta y \): Width and height of the element.
This transformation normalizes the particle’s global coordinates to the element’s local coordinate system.
Shape Functions and Their Derivatives
The shape functions \( N \) and their derivatives \( \frac{\partial N}{\partial \xi} \) and \( \frac{\partial N}{\partial \eta} \) are evaluated at the particle’s local coordinates \((\xi, \eta)\). For a quadrilateral element (Q4), the shape function matrix \( N(\xi, \eta) \) and its derivative matrix \( \frac{\partial N}{\partial (\xi, \eta)} \) are given as:
Shape Function Matrix:
Derivative Matrix with Respect to \( (\xi, \eta) \):
Jacobian Matrix
The Jacobian matrix \( J \) maps derivatives in the local coordinate space \((\xi, \eta)\) to the global coordinate space \((x, y)\). It is computed as:
where:
\( \text{node coords} \) is the \( 4 \times 2 \) matrix of node coordinates:
\[\begin{split} \text{node coords} = \begin{bmatrix} x_1 & y_1 \\ x_2 & y_2 \\ x_3 & y_3 \\ x_4 & y_4 \end{bmatrix} \end{split}\]
Inverse Jacobian Matrix
The inverse of the Jacobian matrix, \( J^{-1} \), is computed to transform the shape function derivatives from local to global coordinates. The element consists of:
Global Derivatives of Shape Functions
Finally, the derivatives of the shape functions with respect to the global coordinates \((x, y)\) are computed as:
In matrix form:
# Current stress of material points
stress = s[p, :]
# Iterate over the nodes of the current element & update nodal values by interpolating material point values
for i, node_id in enumerate(node_ids):
dNIdx = dNdx[i, 0]
dNIdy = dNdx[i, 1]
nodal_masses[node_id] += N[i] * Mp[p]
nodal_momentums[node_id, :] += N[i] * Mp[p] * vp[p, :]
nodal_iforces[node_id, 0] -= Vp[p] * (stress[0] * dNIdx + stress[2] * dNIdy)
nodal_iforces[node_id, 1] -= Vp[p] * (stress[2] * dNIdx + stress[1] * dNIdy)
nodal_eforces[node_id, 1] -= N[i] * Mp[p] * g
nforce = nodal_iforces + nodal_eforces
After determining the derivatives of the shape functions with respect to global coordinates, the material point quantities (such as mass, momentum, and forces) are mapped to the corresponding nodal values using the shape functions \( N_i (\xi, \eta) \) and their derivatives.
For each material point \( p \), the following computations are performed:
Nodal Mass Update
The mass of a node \( I \) is updated by summing the contributions from the material points:
where:
\( N_i \) is the shape function value at the location of the material point, corresponding to node \( i \).
\( m_p \) is the mass of the material point.
Nodal Momentum Update
The nodal momentum is updated by adding the momentum contribution of the material point:
where:
\( \mathbf{v}_p \) is the velocity of the material point.
Internal Force Update
The internal forces are computed using the Cauchy stress tensor \( \sigma \) and the derivatives of the shape functions with respect to global coordinates:
where:
\( V_p \) is the volume of the material point.
\( \sigma_{xx}, \sigma_{yy}, \sigma_{xy} \) are components of the stress tensor at the material point.
External Force Update
The external forces are computed using body forces such as gravity \( \mathbf{g} \):
where \( g \) is the gravitational acceleration.
Nodal Force Calculation
The total force at each node is the sum of internal and external forces:
Matrix Notation for Forces
In matrix form, the internal force at a node \( I \) can be expressed as:
where:
\( \mathbf{B}_I \) is the strain-displacement matrix derived from \( \frac{\partial N}{\partial x} \) and \( \frac{\partial N}{\partial y} \).
\( \boldsymbol{\sigma} \) is the stress tensor.
For the external force:
where \( \mathbf{b} \) is the body force (e.g., gravity).
By summing these contributions, the total nodal force \( \mathbf{f}_I^t \) is obtained.
Update the momenta and impose boundary condition#
# Impose boundary condition
nodal_momentums[left_nodes, 0] = 0
nodal_momentums[right_nodes, 0] = 0
nodal_momentums[bottom_nodes, 1] = 0
nodal_momentums[upper_nodes, 1] = 0
nforce[left_nodes, 0] = 0
nforce[right_nodes, 0] = 0
nforce[bottom_nodes, 1] = 0
nforce[upper_nodes, 1] = 0
# Update nomal momentum
nodal_momentums += nforce * dtime
Update particles (G2P)#
# Iterate over the computational cells (i.e., elements)
for ele_id in active_elements:
# node ids of the current element
node_ids = elements[ele_id]
# coords of the current element
node_coords = nodes[node_ids, :]
# particle ids inside the current element
material_points = p_ids_in_eles[ele_id]
# Iterate over the material points in the current cell
for p in material_points:
# Convert global coordinate "p=(x, y)" to local coordiate "pt=(xi, eta)".
pt = np.array(
[(2 * xp[p, 0] - (node_coords[0, 0] + node_coords[1, 0])) / delta_x,
(2 * xp[p, 1] - (node_coords[1, 1] + node_coords[2, 1])) / delta_y])
N, dNdxi = utils.lagrange_basis("Q4", pt) # shape function and its derivatives
jacobian = node_coords.T @ dNdxi # jacobian
inv_j = np.linalg.inv(jacobian)
dNdx = dNdxi @ inv_j
Lp = np.zeros((2, 2))
for i, node_id in enumerate(node_ids):
vI = np.zeros(2)
vp[p, :] += dtime * N[i] * nforce[node_id, :] / nodal_masses[node_id]
xp[p, :] += dtime * N[i] * nodal_momentums[node_id, :] / nodal_masses[node_id]
vI = nodal_momentums[node_id, :] / nodal_masses[node_id] # nodal velocity
Lp += vI.reshape(2, 1) @ dNdx[i, :].reshape(1, 2) # particle velocity gradient
F = Fp[p, :].reshape(2, 2) @ (np.eye(2) + Lp * dtime) # deformation gradient
Fp[p, :] = F.flatten()
Vp[p] = np.linalg.det(F) * Vp0[p] # update particle volume
dEps = dtime * 0.5 * (Lp + Lp.T) # strain increment
dsigma = C @ np.array([dEps[0, 0], dEps[1, 1], 2 * dEps[0, 1]]) # stress increment
s[p, :] += dsigma # update stress
eps[p, :] += [dEps[0, 0], dEps[1, 1], 2 * dEps[0, 1]] # update strain
kinetic_energy += 0.5 * (vp[p, 0] ** 2 + vp[p, 1] ** 2) * Mp[p]
strain_energy += 0.5 * Vp[p] * s[p, :] @ eps[p, :]
for i, node_id in enumerate(node_ids):
nodal_stresses[:, node_id] += N[i] * s[p, :]
pos.append(xp.copy())
vel.append(vp.copy())
# Update particle-element mapping (elements to which particles belong)
ele_ids_of_particles, p_ids_in_eles = utils.particle_element_mapping(
xp, delta_x, delta_y, n_ele_x, n_elements)
active_elements = np.unique(ele_ids_of_particles)
active_nodes = np.unique(elements[active_elements, :])
This part of the code computes particle updates (velocity, position, stress, strain, deformation gradient, etc.) based on nodal values (forces and momenta) and redistributes updated stresses back to the nodes. Here’s the step-by-step explanation with relevant mathematical formulations:
Iterate Over Elements and Particles
For each element \( e \):
Retrieve:
Node indices: \( \text{node ids} = \{n_1, n_2, n_3, n_4\} \), representing the indices of the element’s nodes.
Node coordinates: \( \text{node coords} \), the global positions of the nodes.
Particle IDs: \( \text{material points} \), the IDs of the particles within the current element.
For each particle \( p \) within the element, we compute its updates as follows:
Convert Global to Local Coordinates
The particle’s global position \((x_p, y_p)\) is transformed into the local coordinate system \((\xi, \eta)\) using:
where \( \Delta x \) and \( \Delta y \) are the element’s dimensions.
Compute Shape Functions and Their Gradients
Shape functions \( N(\xi, \eta) \): The values of the shape functions at \((\xi, \eta)\) are interpolated to determine how particle quantities are distributed to nodes.
Gradients of Shape Functions: The derivatives of the shape functions with respect to global coordinates \((x, y)\) are computed as:
\[ \frac{\partial N}{\partial (x, y)} = \frac{\partial N}{\partial (\xi, \eta)} \cdot J^{-1}, \]where \( J \) is the Jacobian matrix.
Update Particle Velocity and Position
Particle Velocity Update: The velocity of the particle \( \mathbf{v}_p \) is updated using the nodal forces \( \mathbf{f}_I \):
where \( N_i(x_p) \) is the shape function value, \( \mathbf{f}_i = \text{nforce[node id]} \), and \( m_i = \text{nodal masses[node id]} \).
Particle Position Update: The particle position \( \mathbf{x}_p \) is updated using the nodal momentum \( \mathbf{p}_I \):
where \( \mathbf{p}_i = \text{nodal momentums[node id]} \).
Compute Particle Velocity Gradient
The velocity gradient at the particle is computed using:
where:
\( \mathbf{v}_I = \frac{\mathbf{p}_i}{m_i} \): Velocity of node \( i \).
\( \frac{\partial N_i}{\partial (x, y)} \): Gradient of the shape function.
Update Deformation Gradient
The deformation gradient \( \mathbf{F}_p \) is updated using the velocity gradient:
where \( \mathbf{I} \) is the identity matrix.
Update Particle Volume
The particle volume is updated using the determinant of the deformation gradient:
where \( V_p^0 \) is the initial volume of the particle.
Compute Strain Increment
The strain increment \( \Delta \boldsymbol{\varepsilon}_p \) is computed as:
where \( \mathbf{L}_p \) is the velocity gradient.
Update Stress
The stress increment is computed using the material’s constitutive model:
Where, \(\boldsymbol{\theta}\) is the model parameters.
The updated stress is:
Map Stresses to Nodes
Finally, stresses are interpolated back to the nodes:
where \( N_i(x_p) \) is the shape function value at the particle position.
Advance time#
t += dtime
step += 1
Complete code#
times = []
kinetic_energy_evolution = []
strain_evergy_evolution = []
nsteps = int(time / dtime)
step = 0
pos = []
vel = []
print("Computation cycle started...")
while t < time:
if step % output_save_interval == 0:
print(f"Time: {t:.5f}/{time}")
# Refresh the nodal values
nodal_masses.fill(0)
nodal_momentums.fill(0)
nodal_iforces.fill(0)
nodal_eforces.fill(0)
nodal_stresses.fill(0)
# Iterate over the computational cells (i.e., elements)
for ele_id in active_elements:
# node ids of the current element
node_ids = elements[ele_id]
# coords of the current element
node_coords = nodes[node_ids, :]
# particle ids inside the current element
material_points = p_ids_in_eles[ele_id]
# Iterate over the material points in the current cell
for p in material_points:
# Convert global coordinate "p=(x, y)" to local coordiate "pt=(xi, eta)".
pt = np.array(
[(2 * xp[p, 0] - (node_coords[0, 0] + node_coords[1, 0])) / delta_x,
(2 * xp[p, 1] - (node_coords[1, 1] + node_coords[2, 1])) / delta_y])
# Evaluate shape function and its derivatives with respect to local coords (xi, eta) at (x, y).
N, dNdxi = lagrange_basis("Q4", pt)
# Evaluate the Jacobian at current the current local coords (xi, eta).
jacobian = node_coords.T @ dNdxi
# Get the inverse of Jacobian
inv_j = np.linalg.inv(jacobian)
# Get the derivative of shape function with respect to global coords, i.e., (x, y)
dNdx = dNdxi @ inv_j
# Current stress of material points
stress = s[p, :]
# Iterate over the nodes of the current element & update nodal values by interpolating material point values
for i, node_id in enumerate(node_ids):
dNIdx = dNdx[i, 0]
dNIdy = dNdx[i, 1]
nodal_masses[node_id] += N[i] * Mp[p]
nodal_momentums[node_id, :] += N[i] * Mp[p] * vp[p, :]
nodal_iforces[node_id, 0] -= Vp[p] * (stress[0] * dNIdx + stress[2] * dNIdy)
nodal_iforces[node_id, 1] -= Vp[p] * (stress[2] * dNIdx + stress[1] * dNIdy)
nodal_eforces[node_id, 1] -= N[i] * Mp[p] * g
nforce = nodal_iforces + nodal_eforces
# Impose boundary condition
nodal_momentums[left_nodes, 0] = 0
nodal_momentums[right_nodes, 0] = 0
nodal_momentums[bottom_nodes, 1] = 0
nodal_momentums[upper_nodes, 1] = 0
nforce[left_nodes, 0] = 0
nforce[right_nodes, 0] = 0
nforce[bottom_nodes, 1] = 0
nforce[upper_nodes, 1] = 0
# Update nomal momentum
nodal_momentums += nforce * dtime
kinetic_energy = 0
strain_energy = 0
# Iterate over the computational cells (i.e., elements)
for ele_id in active_elements:
# node ids of the current element
node_ids = elements[ele_id]
# coords of the current element
node_coords = nodes[node_ids, :]
# particle ids inside the current element
material_points = p_ids_in_eles[ele_id]
# Iterate over the material points in the current cell
for p in material_points:
# Convert global coordinate "p=(x, y)" to local coordiate "pt=(xi, eta)".
pt = np.array(
[(2 * xp[p, 0] - (node_coords[0, 0] + node_coords[1, 0])) / delta_x,
(2 * xp[p, 1] - (node_coords[1, 1] + node_coords[2, 1])) / delta_y])
N, dNdxi = lagrange_basis("Q4", pt) # shape function and its derivatives
jacobian = node_coords.T @ dNdxi # jacobian
inv_j = np.linalg.inv(jacobian)
dNdx = dNdxi @ inv_j
Lp = np.zeros((2, 2))
for i, node_id in enumerate(node_ids):
vI = np.zeros(2)
vp[p, :] += dtime * N[i] * nforce[node_id, :] / nodal_masses[node_id]
xp[p, :] += dtime * N[i] * nodal_momentums[node_id, :] / nodal_masses[node_id]
vI = nodal_momentums[node_id, :] / nodal_masses[node_id] # nodal velocity
Lp += vI.reshape(2, 1) @ dNdx[i, :].reshape(1, 2) # particle velocity gradient
F = Fp[p, :].reshape(2, 2) @ (np.eye(2) + Lp * dtime) # deformation gradient
Fp[p, :] = F.flatten()
Vp[p] = np.linalg.det(F) * Vp0[p] # update particle volume
dEps = dtime * 0.5 * (Lp + Lp.T) # strain increment
dsigma = C @ np.array([dEps[0, 0], dEps[1, 1], 2 * dEps[0, 1]]) # stress increment
s[p, :] += dsigma # update stress
eps[p, :] += [dEps[0, 0], dEps[1, 1], 2 * dEps[0, 1]] # update strain
kinetic_energy += 0.5 * (vp[p, 0] ** 2 + vp[p, 1] ** 2) * Mp[p]
strain_energy += 0.5 * Vp[p] * s[p, :] @ eps[p, :]
for i, node_id in enumerate(node_ids):
nodal_stresses[:, node_id] += N[i] * s[p, :]
pos.append(xp.copy())
vel.append(vp.copy())
# Update particle-element mapping (elements to which particles belong)
ele_ids_of_particles, p_ids_in_eles = particle_element_mapping(
xp, delta_x, delta_y, n_ele_x, n_elements)
active_elements = np.unique(ele_ids_of_particles)
active_nodes = np.unique(elements[active_elements, :])
times.append(t)
kinetic_energy_evolution.append(kinetic_energy)
strain_evergy_evolution.append(strain_energy)
# if step % output_save_interval == 0:
# result = {"positions": xp, "stress": s}
# save_dir = f"./results_vtk/"
# visualizer.save_vtk(step, result, save_dir)
t += dtime
step += 1
Computation cycle started...
Time: 0.00000/3
Time: 0.10000/3
Time: 0.20000/3
Time: 0.30000/3
Time: 0.40000/3
Time: 0.50000/3
Time: 0.60000/3
Time: 0.70000/3
Time: 0.80000/3
Time: 0.90000/3
Time: 1.00000/3
Time: 1.10000/3
Time: 1.20000/3
Time: 1.30000/3
Time: 1.40000/3
Time: 1.50000/3
Time: 1.60000/3
Time: 1.70000/3
Time: 1.80000/3
Time: 1.90000/3
Time: 2.00000/3
Time: 2.10000/3
Time: 2.20000/3
Time: 2.30000/3
Time: 2.40000/3
Time: 2.50000/3
Time: 2.60000/3
Time: 2.70000/3
Time: 2.80000/3
Time: 2.90000/3
Time: 3.00000/3
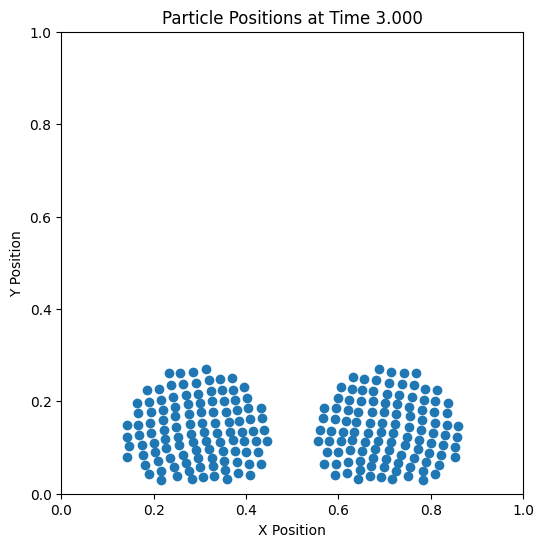
Visualize the result#
Trajectory#
from matplotlib.animation import FuncAnimation
# Create a figure and axis
fig, ax = plt.subplots(figsize=(10, 6))
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.set_xlabel('X Position')
ax.set_ylabel('Y Position')
ax.set_title('Particle Positions Over Time')
# Initialize a scatter plot
scat = ax.scatter([], [])
# Update function for animation
def update(frame):
scat.set_offsets(pos[frame])
ax.set_title(f'Particle Positions at Time {times[frame]:.3f}')
ax.set_aspect('equal')
return scat,
# Create the animation
ani = FuncAnimation(
fig, update, frames=range(0, len(times), output_save_interval), interval=100, blit=True)
# Display the animation in the notebook
from IPython.display import HTML
HTML(ani.to_jshtml())
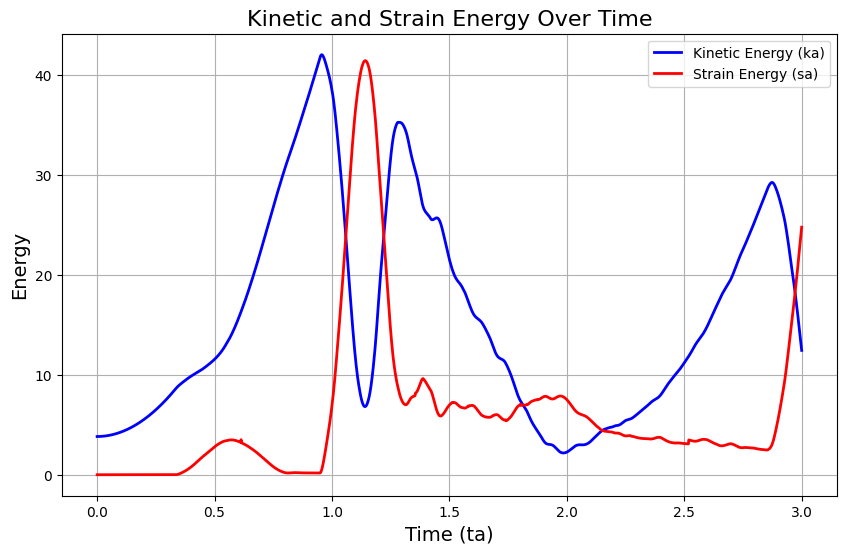
Energy evolution#
# Plot kinetic and strain energy
plt.figure(figsize=(10, 6))
plt.plot(times, kinetic_energy_evolution, label='Kinetic Energy (ka)', color='b', linewidth=2)
plt.plot(times, strain_evergy_evolution, label='Strain Energy (sa)', color='r', linewidth=2)
plt.xlabel('Time (ta)', fontsize=14)
plt.ylabel('Energy', fontsize=14)
plt.title('Kinetic and Strain Energy Over Time', fontsize=16)
plt.legend()
plt.grid(True)
plt.show()