Our research group is dedicated to advancing AI and numerical methods for robotics and control. We combine cutting-edge machine learning techniques with physics-based simulations to enable robots to navigate and interact with complex, unstructured environments. Below are our primary areas of focus:
GNNs & Gaussian Splatting
We leverage Graph Neural Networks for physics-informed learning and dynamics prediction, combined with Gaussian Splatting for real-time 3D scene reconstruction and rendering for enhanced robot perception and planning.
MPM for Robot-Environment Interaction
We use the Material Point Method (MPM) to simulate complex robot-environment interactions, including deformable terrain navigation, manipulation of soft materials, and prediction of granular flow dynamics for robotic applications.
LBM/DEM: Lattice Boltzmann & Discrete Element Method
The Lattice Boltzmann equation Method (LBM) is a meso-scale fluid solver for modeling grain-scale fluid flow. The Discrete-Element Method (DEM) is coupled with LBM to model particle-fluid interactions at the mesoscale.
Research Spotlights
Micromechanics of soil-water-characteristic curve
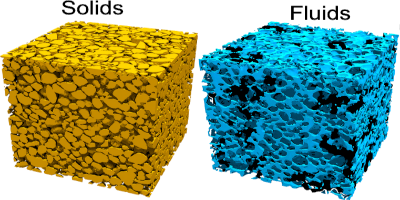
LBM simulations of hysteresis in SWCC.
In Situ Viz with Material Point Method
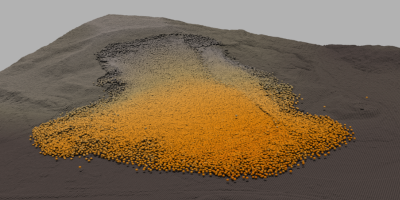
Real-time rendering of MPM landslide simulations